|
|
|
Let's hack the experiments, observe some patterns, prove the theorems, synthesize some methods,
Then, keep iterating.
Then, keep iterating.

- [Personal statement] My research interests span from multi-body dynamics and their controls to real-world experiments. My ultimate target is to realize extreme performance robotics in extreme environments. I am passionate about all branches related to this target, such as Computational methods, Control theory, Modeling techniques, Motor control, Mechanical design, Perception and Manipulation. The following program states my research philosophy:
- In short, the method I use to crack each iteration open is through computation and controls, then I use experiments as my gradient to guide the next iteration. In this process, both mathematical formality and creativity (heuristic) are important to me. My research is largely inspired by the pioneers in the field of robotics:
- Build it, break it, fix it.
- - Marc Raibert
- Video is cheap, show me the experiments.
- There is no demo effect, you just did not prepare enough.
- - Raffaello D'Andrea
What's new?
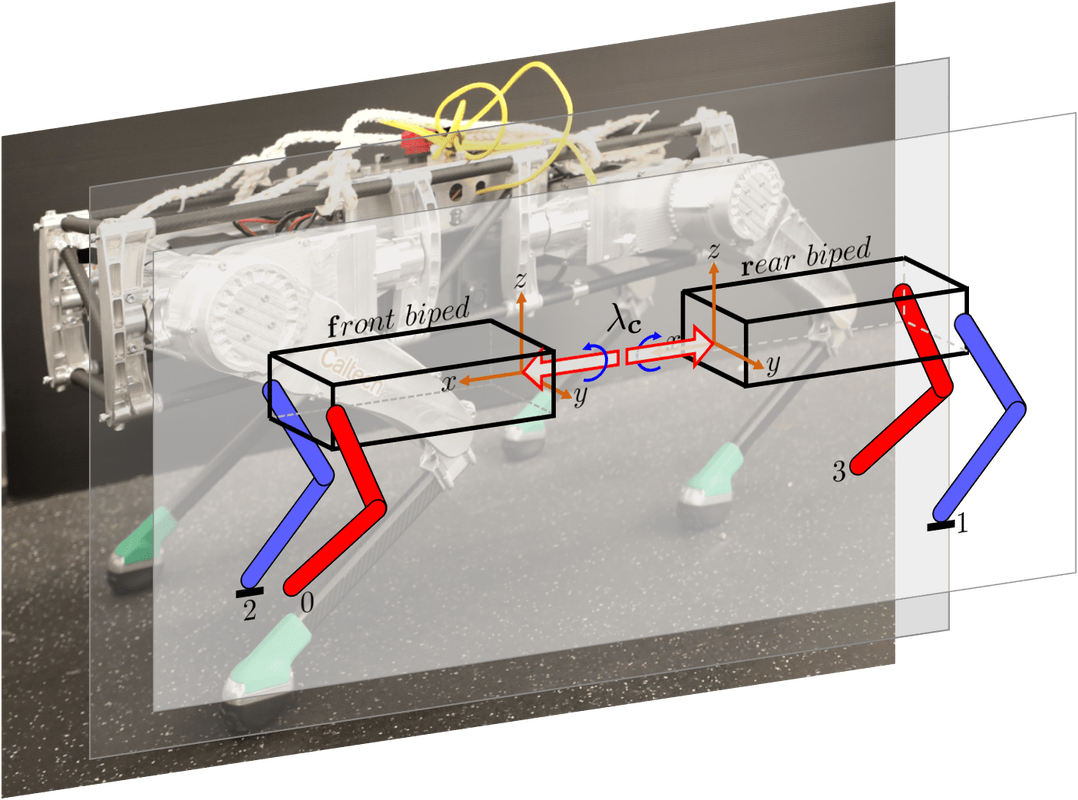
Lately, I worked on dynamic & control decomposition for quadrupedal locomotion (see below) and motion planning for multiple robotic platforms with full-body dynamics & nonlinear controllers. The code to produce the following motions will be released on my Github soon. I am currently designing feedback controllers to realize these behaviors in experiments. In addition, I plan to release the on-board controller for AMBER3M in early 2021 as an open-source experimental platform for everyone to use. Stay tuned :D
|
|
|
|
|
|
 RSS Feed
RSS Feed